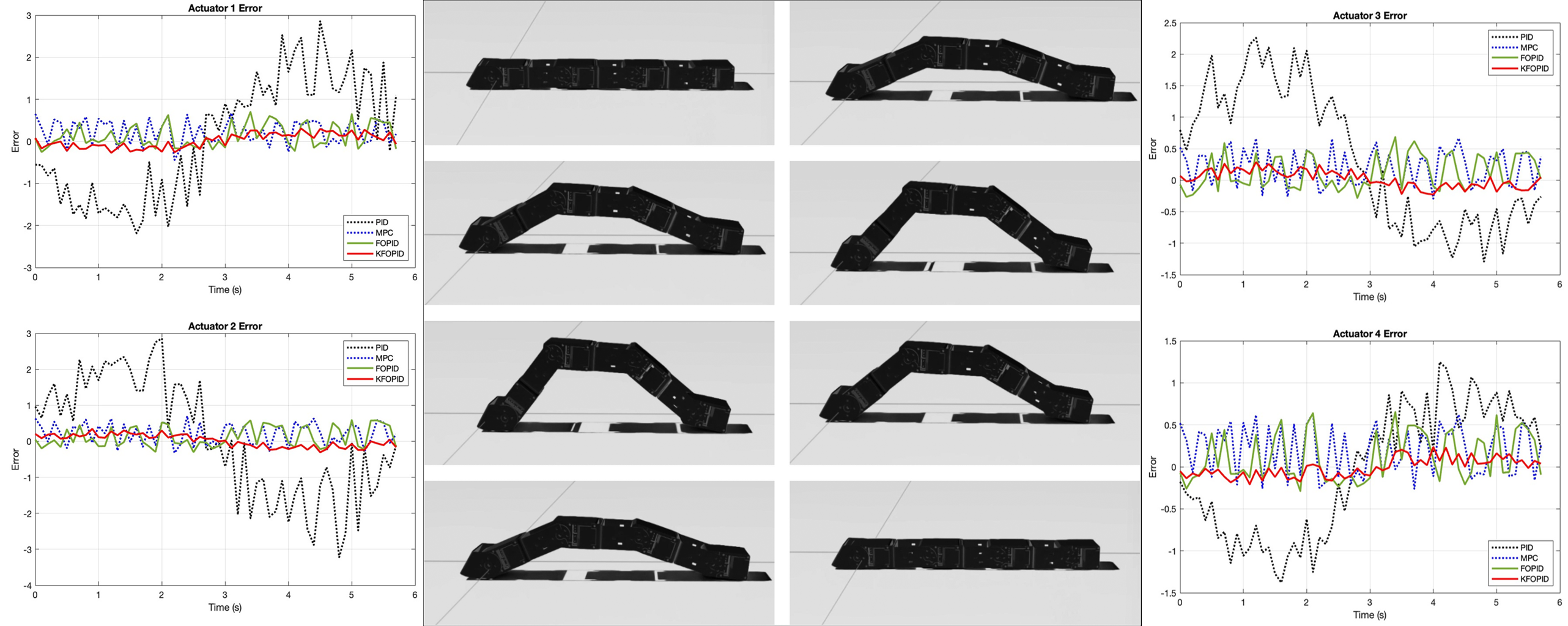
We present a control strategy for worm-like robots that combines PID, MPC, and FOPID controllers with a neural Koopman operator to manage nonlinear locomotion dynamics. By lifting system dynamics into a linear space and updating the model at each timestep, we enable accurate, adaptable control. Experiments and simulations confirm improved trajectory tracking and stability under uncertain conditions.

About Me
I am a Research Engineer at the Robotics and Dynamical Systems Lab, where I pursue my passion for robotics and machine learning. My research focuses on developing control systems for locomotion, photorealistic simulations, and curating data for robot learning.
I earned my M.S. in Robotics and Autonomous Systems from Arizona State University and my B.Tech. in Mechatronics Engineering from NMIMS University in Mumbai. I successfully defended my Master’s thesis at ASU, which involved creating a digital twin of a bio-inspired worm/snake robot using Nvidia Isaac SIM. This research was funded by TSMC Arizona.
Professional Experience
|
TSMC Arizona 08/2024 - 05/2025 Research Fellow |
Unilever 07/2022 - 07/2023 Robotics Engineer |
Mahindra Automotive 07/2021 - 07/2022 Robotics Engineer |
Education
 |
Arizona State University 08/2023 - 05/2025 M.S. in Robotics & Autonomous Systems (Thesis) |
 |
NMIMS University 07/2017 - 06/2021 B.Tech. in Mechatronics Engineering, Minored in Robotics & Internet of Things |
Patent & Publications
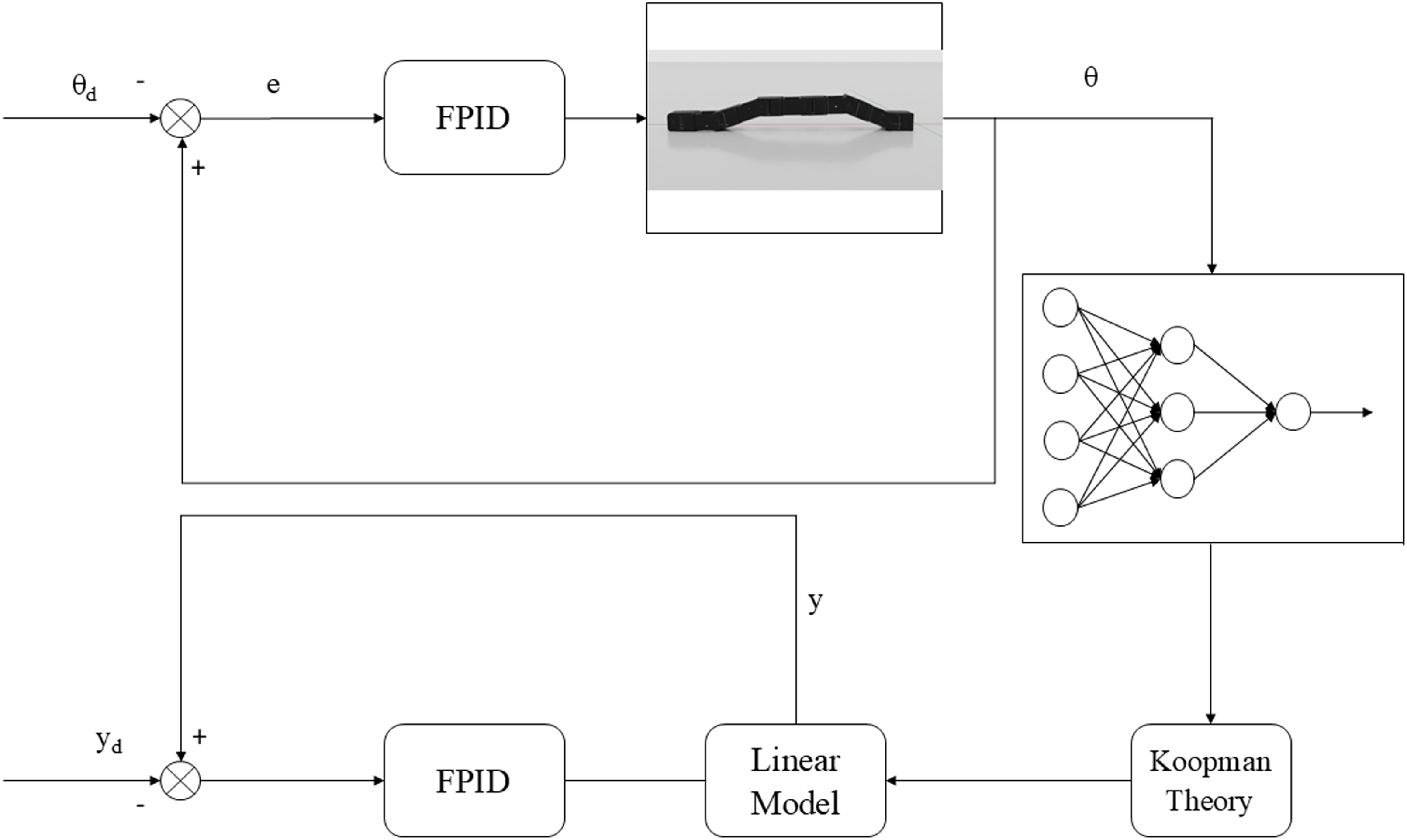
We introduce a data-driven control framework for inchworm robots that combines fractional PID (FPID) control with Koopman operator theory. By training a neural network to model nonlinear dynamics in a lifted linear space, our method enables more systematic and scalable control design. Deployed within NVIDIA Isaac Sim, the approach outperforms conventional methods in trajectory tracking and locomotion efficiency, offering a robust solution for complex, bio-inspired robotics.

Application Number: 375891-001 , PROTECTIVE HELMET (03/2023) in Patent and Design Journal
Copyright was issued for the same project regarding a training module developed in Unity. It can be found here under the diary number of 4912/2023-CO/CF
Inverse Kinematics validation of 5 DOF Caterpillar robot using Nvidia Isaac SIM.
Showcases the entire digital twin loop that helps real robot move and generate data for physically accurate simulation in real time. This helps us test and validate the robot in multiple environments and gauge performance. The paper will be entered into the next IEEE conference.
Developing LLM based control for moving a 9 DOF snake robot in XY plane. This robot now includes sidewinding as well.
Past Projects
This project involves the design and control of a 5-DOF worm-inspired robot capable of metachronal gait generation using Euler-Lagrange dynamics, geometric algebra, and fractional PID and Koopman-based control. A photorealistic digital twin in Isaac Sim validates real-time behavior and enables closed-loop feedback for adaptive locomotion in unstructured terrains.
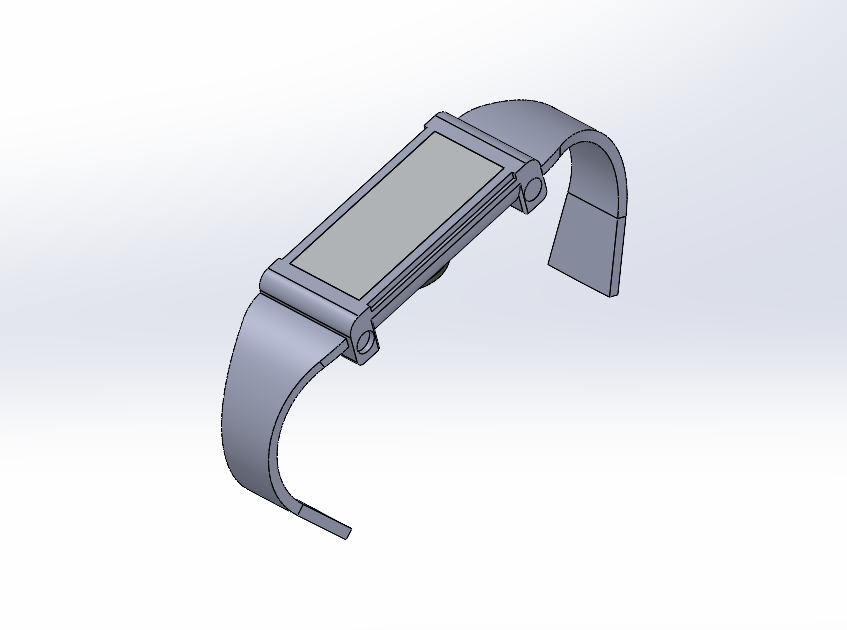
This study highlights the potential of coherent breathing, facilitated by a wearable device, in enhancing heart rate variability and respiratory synchronization. The Balance Bracelet could offer clinicians a non-pharmacological tool to assist patients in managing stress and improving cardiovascular health. Regular use of this technique could lead to better outcomes in patients suffering from stress-related disorders, making it a valuable addition to therapeutic strategies.
LIO-SAM is a tightly-coupled LiDAR-Inertial Odometry system that integrates IMU pre-integration with LiDAR scan-matching within a factor graph framework, enabling accurate and real-time 3D mapping and localization. It is particularly effective in environments where GPS signals are weak or unavailable, such as indoors or urban canyons.
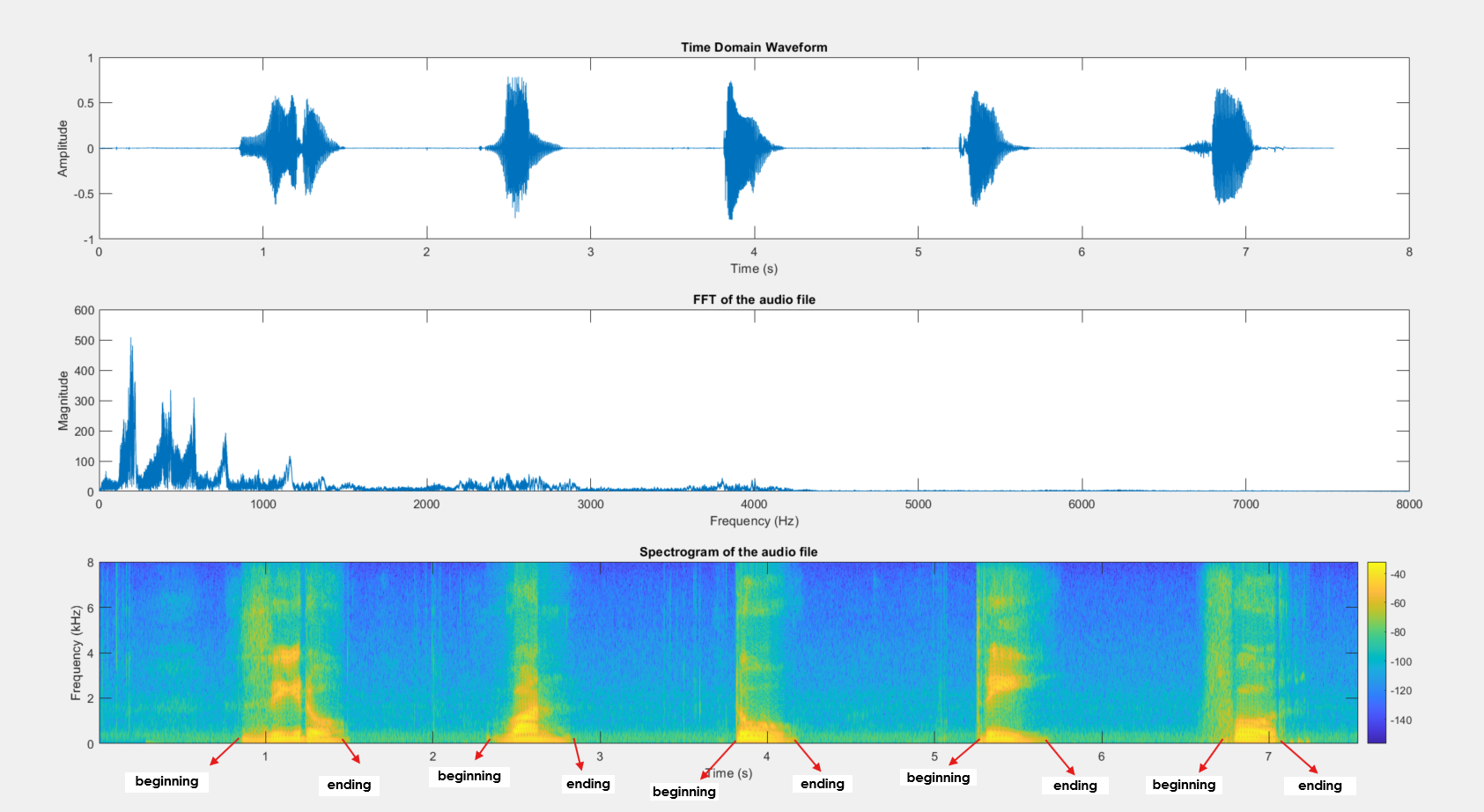
This project explores the classification of spoken digits by converting audio signals into spectrograms and applying convolutional neural networks (CNNs). While achieving 100% accuracy on clean data, the model's performance drops to 88.33% with noisy inputs, highlighting the critical role of data quality and preprocessing in speech recognition systems.
This project implements autonomous navigation on the TurtleBot3 Burger using ROS Noetic. It integrates SLAM, AMCL-based localization, and path planning to enable the robot to map and navigate real-world environments.
This project implements a UR5 robot performing a pick-and-place palletizing task, initially programmed using the UR Teach Pendant's graphical interface for direct control, and subsequently replicated in a ROS2 simulation environment with Gazebo and MoveIt for enhanced flexibility and integration.
Developed a comprehensive digital twin of the MyCobot 280 M5 robotic arm using MATLAB and Simscape Multibody, integrating CAD-based modeling with forward and inverse kinematics. Validated simulation results through real-time control via the pymycobot Python API, ensuring alignment between virtual models and physical hardware performance.