
Bio-Inspired Worm Robot: Dynamics, Control and Digital Twin
This project develops a bio-inspired soft-bodied robot mimicking inchworm locomotion using metachronal gaits. It integrates mathematical modeling, robust control, and digital twin synchronization to enable adaptive locomotion over rough and constrained terrain.
Mechanical Design and Simulation Environment
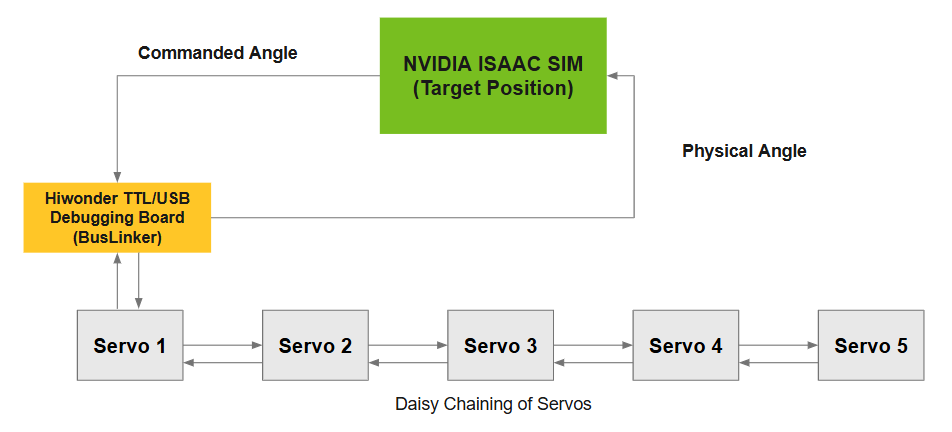
The worm robot features five rotary joints actuated by LX-16A servos (240° range) daisy-chained via TTL communication. The physical design was created in SolidWorks and exported to NVIDIA Isaac Sim via Universal Scene Description (USD). The digital twin runs in real time, receiving servo angle commands and providing visual feedback and trajectory validation.
Kinematics and Gait Generation
Forward and Inverse Kinematics were formulated using geometric algebra:
- Rotor Algebra: Rotations represented via bivectors (e.g.,
R = e^(θ/2 * e1e2)) - Motor Algebra: Unification of translation and rotation in screw theory.
- Metachronal Gait Constraint:
Gait 1: θ₁ = 0, θ₂ = +θ, θ₃ = -θ, θ₄ = -θ, θ₅ = +θ Gait 2: θ₁ = +θ, θ₂ = -θ, θ₃ = -θ, θ₄ = +θ, θ₅ = 0
- Net Displacement Equation: η = 2l(1 - cos(θ))
Inverse kinematics was validated in Isaac Sim by enforcing symmetry and boundary constraints on the head and tail.
Defense Presentation
Dynamics Modeling
Using Euler-Lagrange Formalism for a 5-DOF serial chain:
M(θ)·θ̈ + C(θ, θ̇)·θ̇ + G(θ) = τ
Where:
M(θ) ∈ ℝ⁵ˣ⁵: Mass matrixC(θ, θ̇) ∈ ℝ⁵ˣ⁵: Coriolis/centrifugal matrixG(θ) ∈ ℝ⁵ˣ¹: Gravity vectorτ ∈ ℝ⁵ˣ¹: Joint torques
Clifford Algebra & Motor Algebra:
- Twists and wrenches represented as multivectors
- Joint lines modeled as bivectors; moments and forces treated geometrically
- Recursive Newton-Euler formulation expressed in algebraic multivector form
Control Strategies
PD Control
τ = Kp·e(t) + Kd·ė(t)
Kp = 0.7,Kd = 0.009
PID Control
τ = Kp·e(t) + Ki·∫e(t)dt + Kd·ė(t)
Kp = 2.0,Ki = 0.5,Kd = 0.01
Fractional PID Control (FPID)
τ = Kp·e(t) + Ki·D^{-λ}e(t) + Kd·D^μe(t)
λ = 0.9,μ = 0.8
Sliding Mode Control (SMC)
s = ė + β·e, τ = -Ks·sign(s)
Ks = 3.0,β = 6.5
Koopman-PID Control
- Koopman operator
Ktransforms nonlinear dynamics to lifted linear space:
z_{k+1} = K·z_k τ = PID(z_k)
- Neural network learns
K; PID control operates on lifted statez.
Video Demo
Digital Twin Implementation
- TTL/USB BusLinker connected to real robot streams joint angles to simulation.
- Isaac Sim receives desired trajectories; logs commanded vs actual angles.
- Servo positions, sensor data, and gait transitions validated in simulation.
Video Demo
Video Demo
Sensor Integration and Extensions
- Ultrasonic range sensor mounted on the head for obstacle awareness.
- Step-climbing motion validated via both physical robot and digital twin.
Video Demo
Thesis
Source Code
GitHub Repo